压电快反镜系统结构简析

激光通信系统主要由光学系统、捕获瞄准跟踪系统(Acquisition, Tracking and Pointing, ATP)、通信系统三个基本单元构成。为了能够实现激光通信系统之间的握手和数据通信,就需要通过ATP系统控制激光波束的指向。卫星或其他激光通信节点在震动下能够实现高精度的瞄准、捕获、跟踪是绝大多数激光通信系统的关键技术。机载平台的外部空间环境以及平台内部的复杂震动严重影响着ATP系统的指向精度,此外,由于ATP系统的精度较高,还会受到如空间中的微重力场下的结构应力的影响[1]。
在整个激光通信的过程中,在各种扰动因素的干扰下,为了能够实现持续可靠的激光通信连接,就需要建立一个自由空间激光通信(free-space optical communication,FSO),而建立一个FSO的前提就是保持激光通信两端收发器的光轴的精确对准。由于激光具有极好的方向性同时其发散角极小,因此,激光通信的光束就需要精准的指向接收端。同时,为了防止激光光束在大气或水体内传播受湍流波动引起的折射率变化而导致的光斑抖动、光强变化以及光束漂移造成通信波动,就需要建立一个可靠的ATP系统来纠正由于外部因素导致的干扰[2]。
目前针对激光通信开发的ATP系统可以分为三大类:机械、机电和光学相控阵技术(optical phased array, OPA)。机械ATP系统是由电机驱动的机械可动万向节构成的,这种电机驱动的ATP系统带有反射镜,可以通过发射与接收端两侧的二或三轴万向节对光学链路进行监控和对准。但是由于伺服电机的质量较大,不适合严格限制重量的场合。同时这种系统的转动惯量大,指向分辨率低,不适合远距离激光通信传输[3]。机电ATP系统使用快速反射镜(fast steering mirror, FSM),由于FSM的质量更轻、偏摆速度更高且对准精度高,因此常用于空空以及空地之间的激光通信系统。采用OPA的ATP系统是一种基于光学干涉原理的激光通信技术,是一种相位可调的光学天线阵列,其具有较高的转动精度和转向速度,但其制造成本往往较高[4, 5]。综合以上三种技术的特点,目前激光通信的主要研究方向依然集中在机电ATP系统。
ATP系统的主要任务是建立视距链路(line-of-sight, LOS),由于激光通信系统的两端接收器以及发射器的孔径很小,轻微的漂移均会导致通信受到性能影响,甚至可能导致通信链路的严重退化或丢失。为了克服这些挑战,就需要在ATP系统的关键部件设计提升其鲁棒性以及精度。FSM是影响ATP系统传输距离以及跟踪精度的关键装置[6]。
ATP系统是激光通信系统研究的重点[7],由于激光锥角很小的特性,ATP系统所需的跟踪精度往往很高。为了能够实现大角度高精度的跟踪,典型的ATP系统一般是由粗瞄准系统和精瞄准系统构成。在粗瞄准系统和精瞄准系统的配合下ATP系统实现激光通信光束的对准和跟踪。粗瞄准系统的动态范围较大但是控制带宽较低,常用于大角度的目标搜寻与跟踪,而精瞄准系统有着较大的控制带宽以及精度,但是其瞄准范围较小,因此常用于补偿粗瞄准系统运行的误差。可见,ATP系统的跟踪精度往往受限于精瞄准系统的瞄准精度。
为了建立一个可靠而高效的激光通信连接,避免由于大气湍流导致的光束强度波动、漂移等问题,提升信号传输的信噪比和降低误码率[8],就需要提升ATP系统的跟踪性能,而解决这一问题的关键之一就是提高精瞄准系统的定位和跟踪精度。在精瞄准系统中负责执行偏转光线的机构是快反镜,其控制带宽以及动态性能极大影响着整个精瞄准系统的跟踪、瞄准性能。
快反镜是一种通过控制反射镜面在一维或者二维空间上摆动从而精准控制光束反射方向的光电器件,其系统组成如下图所示。自20世纪80年代伊始,国内外众多科学研究根据使用场景设计了多种采用不同最大偏摆范围、位移分辨率、动态性能等参数的FSM系统,广泛应用于包括激光雷达、空地激光通信、卫星激光通信、激光导引、高性能太空望远镜、光学扫描等多领域。FSM系统常用于需要稳像、高速扫描、跟瞄等功能的领域,采用FSM代替万向节机械结构器件可以极大的提升系统性能[9]。

快反镜是一种通过控制反射镜面在一维或者二维空间上摆动从而精准控制光束反射方向的光电器件。
当前快反镜产品中按照驱动方式分类可以分为音圈电机快反镜和压电陶瓷快反镜(Piezoelectric Fast Steering Mirror, PFSM)。其中音圈电机快反镜是基于安培力原理,通过采用由磁性外壳和线圈组成的音圈电机驱动镜面运动,具有高可靠性、低磁滞性、线性度高、响应速度快、行程大等优点,但位移精度较差。因此音圈电机快反镜常用于需要大角度偏转的领域[10],音圈电机快反镜结构主要包括音圈电机,反射镜,传力导向机构等。
压电陶瓷快反镜是由压电叠堆致动器驱动反射镜偏摆的精密光电仪器,压电陶瓷快反镜利用逆压电效应驱动反射镜摆动,集合了压电陶瓷微位移驱动技术、精密光机系统设计理论、高精度位移检测技术、控制论、位移放大机构设计等精密仪器技术于一体,具有出力性能好、位移精度高、结构简单、发热少等优点,但是它存在最大位移小、迟滞特性等缺点。压电陶瓷快反镜应用广泛、型号多样,常用于体积小、分辨率高的场合,压电陶瓷快反镜结构主要包括压电陶瓷致动器,反射镜,传力结构等。
为了满足当前针对激光通信系统小型化、精确化的要求,当前的压电陶瓷快反镜一般采用柔性铰链设计,使其具有能耗低、长寿命、易于装备、系统部件间免润滑无摩擦、高精度等特点,替代了传统的刚性轴式扫描镜。为了提升ATP系统的最大视场角和跟踪速度,目前针对压电陶瓷快反镜系统参数的设计主要集中在镜面直径、最大偏转角度、响应速度、系统非线性度等方面[11]
快反镜系统的设计种类多样,按照优化方向分类可以划分为致动器优化、传力机构优化、结构体积优化、预压力优化等。
致动器优化
快反镜的致动部件主要分为音圈电机和压电陶瓷叠堆致动器两种,两者在位移行程以及位移精度存在优势互补的现象,因此需要针对快反镜的使用场景选取合适的致动器,并优化其设计,使快反镜性能达到局部参数最优的效果。
PI公司针对卫星激光通信、图像处理/稳定、光学捕获等领域设计了一系列PFSM系统。S3系列压电快反镜采用了高寿命的PICMA压电陶瓷促动器,该陶瓷的使用寿命是传统压电叠堆的10倍,可以无故障运行超过1000亿个循环。系统采用了零间隙柔性铰链,可以实现系统工作零摩擦免润滑。S3系列压电快反镜的镜面直径在19mm~50mm之间,不同型号的角行程为±2mrad~±17mrad,闭环控制带宽为300Hz,闭环角位移精度为0.05μrad[12, 13]。PI公司的S3系列压电快反镜如下图所示。

由上述快反镜设计可以看出,在致动器优化领域主要采用如下几种优化手段:通过选取音圈电机作为致动器使快反镜的最大角位移增大,通过传感器精确采集位移信号抑制由致动器带来的非线性误差以此提升系统的位移精度,采用高寿命压电陶瓷叠堆延长快反镜的使用寿命。
传力机构优化
快反镜的传力机构作为连接致动器和反射镜的关键部件,其设计往往极大影响到快反镜的最大角位移、精度、寿命等关键指标,因此针对传力机构的优化是十分重要的。
2020年,中科院上海技物所的谢勇等人设计了一款基于位移放大机构的压电陶瓷快反镜。压电陶瓷快反镜的最大位移往往受压电陶瓷叠堆最大位移的限制,而压电陶瓷叠堆的位移一般在20μm的级别,因此改善压电陶瓷快反镜的柔性铰链结构就尤为重要。该研究通过采用二级杠杆式的柔性铰链位移放大结构,可以将压电陶瓷叠堆的位移放大9倍左右。通过实验测试,该压电陶瓷快反镜可以达到52.93mrad的最大角位移,系统定位精度为2.88μrad,系统谐振频率为105Hz[14]。此款基于位移放大机构的压电陶瓷快反镜如下图所示。

由上述快反镜的结构优化可以看出,在传力机构方面的优化主要采用杠杆式柔性铰链设计、柔性膜传力机构设计、半蝶形柔性铰链设计等。其中杠杆式柔性铰链可以放大致动器的位移,提升快反镜的最大角位移,柔性膜传力机构可以极大的增大快反镜的快反镜固有频率并维持快反镜的位移能力,半蝶形柔性铰链设计可以避免快反镜偏摆过程中的中心漂移问题。
体积结构的优化
为了降低激光通信系统的体积,降低卫星发射成本,为其他设备预留空间,就需要在保证快反镜性能的前提下尽可能的缩小快反镜的体积。
由上述快反镜设计可知,压电快反镜的小型化设计会带来一部分的性能损失,这就要求激光通信中其他部件如粗跟踪系统具备更佳的性能来弥补快反镜的性能不足,对于激光通信系统的总体设计有着较高的要求。
预压力优化
针对航天发射等大过载恶劣工况的领域,由于快反镜部件的损坏难以得到维修,因此需要对压电陶瓷致动器等关键部件的可靠性设计尤为重要。为了抵抗火箭升空时压电陶瓷受到的振动以及剪应力,就需要向压电陶瓷的轴向施加预压力,以增大其强度。
常规的压电陶瓷快反镜预紧力机构采用柔性铰链,由于运动中的弹性变形会导致镜面旋转中心不固定的问题,同时柔性铰链在长时间运行后会存在疲劳问题,极大的曾大了系统的控制难度。
由上述研究可知,针对压电陶瓷的预压力优化研究主要集中在:优化压电陶瓷预压力来源,采用永磁体为压电陶瓷提供预压力,避免由于柔性铰链失效导致快反镜故障的问题;优化柔性铰链设计,为压电陶瓷提供足够的预压力,提升压电陶瓷的抗剪性能;设计抗剪力外壳,增大系统强度,为压电陶瓷提供合适的预压力,确保系统可靠性。
目前无论国内还是国外的主流快反镜型号口径不大,大部分反射镜尺寸小于ϕ50mm,音圈电机快反镜的角行程一般可达0.035rad,远高于压电陶瓷快反镜0.0082rad的角行程,但是其定位精度一般低于压电陶瓷快反镜。由此可见,在多数情况下快反镜系统在大行程和高精度两方面难以兼备。尤其需要注意的是,压电快反镜需要考虑由于压电陶瓷自身性能带来的位移非线性问题,并且由于压电陶瓷的迟滞现象也大大增加了压电陶瓷快反镜的控制难度。
压电陶瓷快反镜常采用柔性铰链结构,而该结构因其高频长时间运行的特性会造成由材料疲劳导致的使用寿命受限的问题。因此合理优化柔性铰链设计是大部分快反镜设计的核心内容。
快反镜的最大角位移是最受重视的参数之一,而该参数往往受限于压电陶瓷性能和系统结构设计。因此无论是从压电陶瓷制造工艺还是压电陶瓷装配方法优化以及系统总体设计均会极大影响系统的最大角位移情况。
一些设计为了适应航天发射大加速度、强冲击等恶劣工况,需要加强快反镜关键部件的抗冲击能力,而压电陶瓷叠堆致动器的抗剪能力一般较差,因此针对这一问题一般采用为压电陶瓷提供预压力的设计。
快反镜设计的关键指标
根据使用场景不同,快反镜系统的关键性能指标不同,面向空间激光通信等航天领域,需要综合考虑各项因素:反射镜的面型尺寸、快反镜偏摆的最大角位移、偏转线性度、快反镜的重复定位精度、快反镜的机械谐振频率、快反镜的正交误差、快反镜的上电稳定性、寿命及可靠性[15-17]。
快反镜的系统构成

快反镜系统一般包含反射镜、致动器、外壳及柔性铰链、镜座、底座。快反镜系统的结构如上图所示。在快反镜系统中,每个部分的要求如下:
(1)反射镜:反射镜是快反镜中负责反射激光的部件,设计中为了防止激光照射产生严重的热影响,如镜面或者镜座发生热形变,会对反射镜提出增反降透的要求,一般会采用镀高反膜的反射镜。反射镜的面型精度也是快反镜设计中需要考虑的一大问题,较差的面型精度会导致成像质量的下降,甚至会导致光线的反射出现偏差,因此良好的面型精度也是确保系统精度的关键问题[18]。同时,反射镜的质量也会影响到系统的转动惯量,较大质量的反射镜会增大偏摆部的转动惯量,从而导致系统的动态性能下降,但是盲目添加降低反射镜质量的减重设计会导致反射镜的强度下降,影响面型精度,因此需要针对实际应用场景合适选用反射镜的设计。
(2)致动器:致动器是为快反镜提供动力的关键部件,其精度和位移情况极大的影响着快反镜系统的偏摆精度以及最大角位移。目前,用于微小位移领域的致动器主要分为音圈电机致动器和压电陶瓷叠堆致动器[19]。
压电陶瓷致动器(piezoelectric actuators, PEAs),是一种利用压电陶瓷的逆压电效应原理设计的线性致动器件,通过将极化方向上的电场转换为机械变形的方式向外部提供位移,实现电能转化为动能[20]。
音圈电机(voice coil)是一种利用安培力原理设计线性运动电机,相较于压电陶瓷致动器具有更大的位移行程[21],但是精度较差,通过改变线圈中的电流方向与强度可以控制动子的位移方向与速度,实现线性的位移。
两种致动器的性能对比如下表所示:

可以看出两种致动器在各自的领域均有着较大的优势。压电陶瓷因其极高的位移精度以及出力性能在微动领域得到了大量使用。而音圈电机快反镜则可以补充其最大位移较小的问题,因此在快反镜系统中这两种致动器均收到研发人员的青睐,往往需要针对应用场景权衡两者的优劣选用相应的致动器件。
针对快反镜领域,由于激光通信ATP精瞄准系统的高精度要求,需要致动器可以提供高精度的位移。音圈电机虽然具备较高的线性度,无滞后等优势,具有更大的致动行程但因其位移分辨率低难以满足这一使用场景,而压电陶瓷致动器因其较高的位移精度可以胜任这一工作,同时迟滞问题可以通过闭环控制等手段补偿,因此快反镜设计中应该优先考虑压电陶瓷致动器,而针对大孔径的场景往往使用音圈电机作为致动器驱动大范围扫描[22]。
(3)外壳及柔性铰链:外壳及柔性铰链是连接反射镜等可动件与致动器的关键部件。其在快反镜系统中既担任承载件的角色,又要担任传导件的角色。一方面柔性铰链需要保证一定的强度以满足非工作方向的响应速度要求,另一方面柔性铰链需要尽可能将致动器的位移无损的传导给反射镜,因此又要具备足够的柔性。柔性铰链及外壳的设计需要尽可能的平衡二者影响。同时柔性铰链作为快反镜中运动最为频繁的部件,其使用寿命也是设计人员需要考虑的问题。
(4)镜座:为了尽可能的提升系统的动态性能就需要降低可动件的转动惯量,因此镜座部分的减重设计是需要考虑的因素。同时,在高能激光的场景下为了保证反射镜的面型精度,需要考虑在镜座部分添加热防护设计,减小因热应变导致的镜面变形[23]。
(5)底座:底座是快反镜其他部件安装的基础,其需要承受致动器在位移时输出的推力,同时要确保快反镜系统能够牢固的安装在ATP系统中,因此底座需要保证有足够的强度。
快反镜系统方案设计
快反镜系统的视场角决定了反射镜的直径以及偏摆行程,同时需要针对反射镜的使用场景进行详细的设计,包括考虑反射镜的散热问题采用增透膜,为了降低转动惯量尽可能选用较轻材质的镜面,针对视场的形状选用不同形状的反射镜等。当反射镜确定选型后,系统的转动惯量也随之确定。随后针对这一参数选择合适的压电致动器,并根据其出力性能以及位移情况合理设计柔性铰链。
反射镜的动态性能要求决定了柔性铰链以及外壳的刚度,由已知的镜面质量可以确定柔性铰链在工作方向上的强度要求,同时也要确保非工作方向的强度以控制系统谐振频率,综合以上要求对柔性铰链进行设计。
系统的精度往往受限于压电陶瓷的布置方案、原料选型等工作,因此选择合适的驱动方案有助于快反镜系统精度的提升。
反射镜的选型
在快反镜系统中由于激光的照射镜面会产生一系列因热量产生的应力以及变形问题,以此选择一种质量轻,热膨胀系数低,比刚度高特性的反射镜材料尤为重要。比刚度是一种表征材料抵抗单位载荷带来形变能力的物理量,比刚度越高,材料受到外力导致的结构变形越小,因此选用一种高比刚度的材料有利于维持反射镜的面型精度。SiC是一种能够满足以上要求的反射镜材料,其具备化学性能稳定、导热系数高、热膨胀系数小、比刚度高等特点[24],非常适合作为激光通信快反镜领域的反射镜材料。
柔性铰链设计
柔性铰链具有加工简便、成本低廉、易于实现小型化、定位精度高等优点。常用于微动设备、微定位装置、原子力显微镜中的精密定位台、快反镜、光纤对接装置等超精密仪器中[25]。
柔性铰链作为具有弹性变形的旋转/平移关节,用于精确的运动部件。与传统的连杆机构相比,柔性铰链具有无摩擦、无间隙、不需要定期润滑、结构简单、成本低、运动精度高等优点。因其优良的运动特性广泛受到了广泛的重视,常被科研人员用于精密的微小位移场合。
在快反镜系统中,柔性铰链作为支撑和连接快反镜镜面与运动部件的部分,需要能够无损的传递致动器的位移,并吸收系统内部应力。因此,快反镜的设计中需要做到柔性与刚性的平衡。当快反镜的刚性过高时,由于柔性不足会导致致动器的位移难以传导给上部的快反镜镜面,导致系统位移受限,系统最大角行程降低。铰链刚性过高会导致应力传导至镜座,使镜座发生弹性形变,影响反射镜面的面型精度,导致成像质量下降,甚至严重影响系统的跟踪、瞄准精度。因此为了确保反射系统的精度,就需要使柔性铰链具备足够的柔性将运动时产生的应力吸收。
柔性铰链按柔度分布情况不同可以分为多种类型,通过多种柔性铰链的组合可以设计出满足不同场合的的柔性铰链。细杆型柔性铰链、平板型柔性铰链以及缺口型柔性铰链最为基础。其中细杆型柔性铰链的柔性沿轴线的法平面分布,平板型柔性铰链的柔性沿板面的法向分布,而缺口型柔性铰链因其截面的厚度不一,柔性在最窄处最大。其他的柔性铰链构型如柔性球铰、蝶形柔性铰链、梁交叉柔性铰链的特性各不相同,针对不同的使用场景拥有更好的适配性。
目前,缺口型柔性铰链的发展最为完善,其应用场景也比较广泛。缺口型柔性铰链的轮廓主要发展出了如下形貌:圆弧形、双曲线型、抛物线性、复合曲线、椭圆形、V型等等[26, 27],如下图所示。

柔性铰链的性能指标,主要包括:运动范围、轴向尺寸、柔度-应力比、应力集中、轴漂、离轴刚度-轴向刚度比。针对不同的设计目标,每个评价指标的优先级是不同的。快反镜系统最受关心的参数为偏摆的最大角行程,因此柔性铰链的运动范围是最为优先考虑的参数。在快反镜系统中为了控制系统的动态性能就需要尽可能的降低转动惯量,快反镜系统如下图所示,镜面与柔性铰链之间的距离𝑆𝑙−ℎ越大,系统的转动惯量也就越大,系统的动态性能就会越差。因此在快反镜设计中在保证运动范围一致的前提下,就需要优先考虑到降低柔性铰链的轴向距离。

驱动器布置方案
压电快反镜的致动器布置也是需要考虑的关键问题,一般二维压电快反镜可以采用2~4点并联驱动,两点致动器布置方案存在由于非对称带来的温飘、高频耦合、柔性铰链因受力不均导致寿命下降的问题。
三点致动器布置方案

三个致动器采用等边三角形布置,其中轴心位于等边三角形的中心点上,这种布置方式存在以下优点:
-
致动器在底座上沿圆周间隔120°分布,可以有效抑制温漂;
-
在装配向压电陶瓷施加预紧力时可以避免镜面的偏转;
-
轴向误差因中心点移动不受偏转角度的影响而可以得到补偿;
-
漂移可以通过压电陶瓷的伸缩得到有效的抑制。
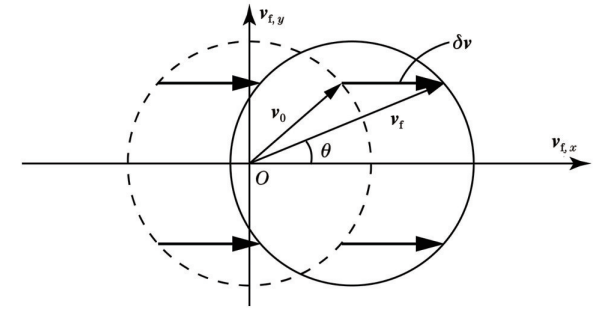
由于压电陶瓷的原理,其只能施加正向电压而正向位移,不存在反向电压下长度压缩的特性,为了能够实现压电陶瓷在电压的作用下伸缩,就需要设置压电陶瓷最大电压的一半作为位移的初始点,此时反射镜面会在压电陶瓷的推动下平移,当3个压电陶瓷存在差动信号时快反镜面会发生偏转。
四点致动器布置方案

四个致动器采用正方形形布置,其中轴心位于正方形的中心点上,这种布置方式存在以下优点:
-
反射镜的中心不会向Z方向发生平移,因此不需要补偿竖直方向上的误差;
-
反射镜在预紧力的作用下不会发生偏转;
-
致动器对称布置可以极大抑制温漂;
压电致动器均布置在X、Y两轴上,因此控制简单。由于压电致动器的对向布置,因此实现分别绕两轴的旋转仅仅需要差动控制一对压电陶瓷即可实现。
参考文献:
[1] Li Q, Liu L, Yang H J. High Accuracy and Multi-Target Acquisition, Pointing and Tracking under Satellite Micro-Vibrations [J]. Microgravity Sci Technol, 2020, 32(4): 715-727. [2] Ke X Z, Zhang P. Automatic Focusing Control in Beaconless APT System [J]. J Russ Laser Res, 2020, 41(1): 61-71. [3] Abdelfatah R, Alshaer N, Ismail T. A review on pointing, acquisition, and tracking approaches in UAV-based fso communication systems [J]. Optical and Quantum Electronics, 2022, 54(9): 571. [4] He J W, Dong T, Xu Y. Review of Photonic Integrated Optical Phased Arrays for Space Optical Communication [J]. Ieee Access, 2020, 8: 188284-188298. [5] Derakhshandeh A, Pachnicke S, Hoeher P A. Underwater Wireless Laser-Based Communications Using Optical Phased Array Antennas [J]. Ieee Photonics Journal, 2023, 15(5): 9. [6] Lahari S A, Raj A, Soumya S. 2021 International Conference on System, Computation, Automation and NeTWorking (ICSCAN)[C]. Puducherry: IEEE, 2021. [7] 董全睿,陈涛,高世杰,等.星载激光通信技术研究进展[J].中国光学,2019,12(06):1260-1270. [8] Wang T, Zhao X, Song Y, et al. Atmospheric Laser Communication Technology Based on Detector Gain Factor Regulation Control [J]. Ieee Access, 2021, 9: 43339-43348. [9] 刘力双,夏润秋,吕勇,等.音圈电机快速控制反射镜研究现状[J].激光杂志,2020,41(09):1-7. [10] Shinshi T, Shimizu D, Kodeki K, et al. A Fast Steering Mirror Using a Compact Magnetic Suspension and Voice Coil Motors for Observation Satellites [J]. Electronics, 2020, 9(12): 11. [11] Ran B, Wen L H, Zhu L C, et al. Coupled dynamic reaction force study of a large-aperture piezoelectric fast steering mirror [J]. Appl Optics, 2021, 60(12): 3393-3402. [12] Cao K, Hao G, Liu Q, et al. Hysteresis modeling and compensation of fast steering mirrors with hysteresis operator based back propagation neural networks [J]. Micromachines, 2021, 12(7): 732. [13] Zihao Y, Lihao W, Yang W, et al. Control of a novel MEMS Fast Steering Mirror with improved quasi-static performance [J]. IEEE Access, 2023, 11: 95307 - 95314. [14] 谢永,刘重飞,贾建军,等.基于位移放大机构的压电快速反射镜设计[J].上海交通大学学报,2021,55(09):1142-1150. [15] Ferrer E M, Pandian M S, Uranga A, et al. 2018 IEEE Micro Electro Mechanical Systems (MEMS)[C]. Belfast: IEEE, 2018. [16] 余子昊,王栎皓,汪洋,等.卫星激光通信快速反射镜研究进展及发展趋势[J]. 激光与光电子学进展,2023,60(15):43-52. [17] 王俊尧. 空间多节点间激光通信组网APT技术研究 [D]. 长春: 长春理工大学, 2023: 2-16. [18] 王平,代锋,杨士成.基于硅基MEMS工艺的快速控制反应镜制作[J].空间电子技术,2023,20(04):91-97. [19] Zhong J P, Nishida R, Shinshi T. Design and precision tracking control of a high-bandwidth fast steering mirror for laser beam machining [J]. Precis Eng-J Int Soc Precis Eng Nanotechnol, 2022, 73: 128-139. [20] Wan Y, Xiong H, Song T Q, et al. Design of a fast steering mirror driven by piezoelectric ceramics [J]. Opt Eng, 2022, 61(2): 17. [21] Liu C S, Wu Y C, Lan Y J. Design of 4-DOF Voice Coil Motor with Function of Reducing Laser Geometrical Fluctuations [J]. Actuators, 2021, 10(12): 14. [22] Xiao R, Xu M, Shao S, et al. Design and wide-bandwidth control of large aperture fast steering mirror with integrated-sensing unit [J]. Mechanical Systems and Signal Processing, 2019, 126: 211-226. [23] 刘重飞,贾建军,谢永,等.用于高能激光的快速控制反射镜设计方法研究[J]. 机械设计与研究,2018,34(04):5-8+13. [24] Yi L Q, Zhang X J, Hu H F, et al. Comprehensive study of the rapid stressed mirror polishing method for off-axis aspheric SiC thin-plate mirrors [J]. Opt Express, 2020, 28(22): 32802-32818. [25] Wang G L, Wang Y, Lv B R, et al. Research on a New Type of Rigid-Flexible Coupling 3-DOF Micro-Positioning Platform [J]. Micromachines, 2020, 11(11): 20.免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间联系我们,我们将协调进行处理,最终解释权归旭为光电所有。