反射层析激光雷达实现10.38 km处小目标超分辨成像
RTL成像技术相关的研究有:(1)1988年,美国林肯实验室的Parker等人利用基于光电倍增管和瞬时数字化仪的非相干激光雷达实验系统,对距离10 m处底部直径53 cm、高170 cm的圆锥体目标进行截面图像重建,成像分辨率为12.6 cm;(2)1989年,Knight等人对该系统进行了改进,用EG&G条纹相机取代了光电倍增管,将成像分辨率提高到4 cm;(3)2001年,美国空军研究实验室Matson等人对轨道高度514 km的LACE卫星体和望远镜臂上的两个相距6 m的锗角反射镜实现了相对位置重建,间距分辨能力约为0.2 m;(4)2010年,美国Longmont光学系统研发中心的Murray等人进行了基于脉冲压缩的距离分辨成像试验,在22.4 km处实现了间距1 m、尺度为30 cm的三个均匀旋转角度反射镜的相对位置重建,间距分辨能力为15 cm;(5)2020年,航天工程大学陈剑彪等人开展了线性调频连续波相干探测仿真实验,对21 cm×17 cm×12 cm的目标进行截面图像重建,仿真结果的距离分辨率为3.75 cm;(6)2021年,国防科技大学胡以华等人构建了高分辨率RTL成像实验系统,并在合肥董铺水库大坝实现了距离约1 km、成像分辨率优于2 cm的高分辨率RTL成像实验。
远距离超分辨率RTL成像的实现面临大气衰减、近地面湍流和目标小且特征复杂等挑战,这对高信噪比的精确回波波形获取提出了极高的要求。
国防科技大学胡以华教授团队以解决远距离高分辨率成像关键技术为宿求,历经多年潜心钻研新型激光成像方法,于近期突破了窄脉冲激光产生、脉冲激光信号高保真高速采集、超分辨垂轴投影成像重构算法等关键技术后,研制出性能更优的RTL成像实验系统。该系统主要参数为:工作波长1064 nm,激光脉冲宽度73 ps,光电探测器带宽7. 5 GHz,采集系统采样率50 GSa/s,接收光学系统孔径260 mm。
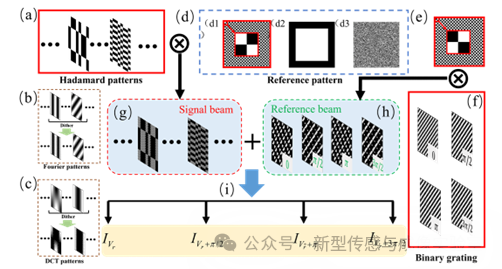
RTL成像系统发射脉冲激光束对目标进行全覆盖,通过其与目标之间的相对角运动,多角度准确获取包含目标表面反射分布信息的回波数据,解算得到反射系数投影分布。根据傅里叶中心切片定理,投影数据的一维傅里叶变换和目标投影图像的二维傅里叶变换相等,通过专用算法进行目标图像重构处理,实现激光束垂轴方向的目标投影成像,RTL成像原理图如图1所示。

在实际成像过程中,由投影数据到目标图像的实现需要经过投影数据预处理、投影数据配准、目标图像重构和重构图像处理等环节。为获取多角度的投影数据,需要保证足够多的投影采样点,以保证经过频域变换所得到的目标重构图像完整、精准。


该系统光学孔径为260 mm,相同孔径的光学成像系统衍射极限为5 μrad,对应10 km处常规光学成像的极限分辨率约为5 cm。根据基于MTF的图像质量评价方法,计算得到RTL成像的极限分辨率约为1.7 cm,高于相关的激光反射层析研究及传统光学成像的衍射极限,目前实现厘米级成像分辨率属于国内外报道的最高水平。
结合RTL成像的应用场景,未来还需在以下方面做进一步研究:(1)开展RTL成像与其他激光探测方法的融合研究,提高RTL成像目标重构图像的应用价值;(2)发展出效率和精度兼顾、简单易行且适用范围广的回波数据处理方法,解决影响其面向实际应用的关键问题;(3)提出新的目标图像重构方法和图像处理方法以提升RTL成像目标重构图像质量,破解影响其成像质量的核心问题;(4)RTL成像是为实现远距离目标高分辨率成像而发展的,需要采用大功率、稳定的窄脉冲激光光源,高保真高速的光电探测器,高光学效率的光学系统和高速脉冲采集器等。
国防科技大学电子对抗学院胡以华教授科研团队长期致力于激光精确信息获取理论与应用研究,围绕目标的激光三维成像、反射层析激光雷达成像、大气扰动激光探测、相干探测、光子探测以及量子纠缠探测方法,取得了一系列研究成果,为空天弱暗目标远距离探测、高精度定位和多维信息获取提供新型技术手段。团队先后出版专著《激光成像目标侦察》、《目标衍生属性光电侦察技术》、《Theory and Technology of Laser Imaging Based Target Detection》和《激光相干探测应用理论方法》,公开发表学术 论文300余篇,授权发明专利70余项,获国家技术发明二等奖2项、国家教学成果二等奖2项、安徽省重大科技成就奖、军队/省部级科技一等奖8项。
免责声明:本文旨在传递更多科研资讯及分享,所有其他媒、网来源均注明出处,如涉及版权问题,请作者第一时间联系我们,我们将协调进行处理,最终解释权归旭为光电所有。